
キャンパスライフレポート
尊敬する先生から実践的な学びを得て夢にまで見た企業に内定!
工学部 先端機械工学科 4年生(取材時)
H.N.さん
- 埼玉県 越谷南高等学校 卒
私のキャンパスライフShot!
-
1年次に完走させたライントレースロボット
-
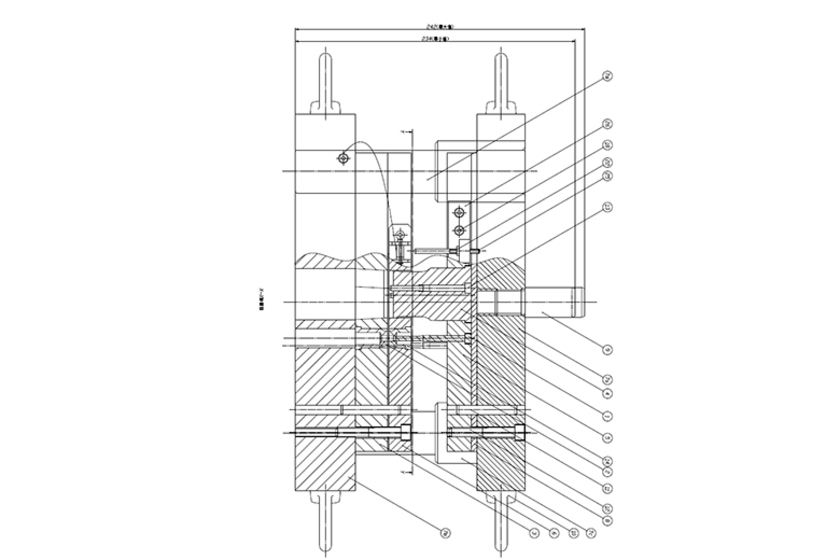
3年次はCAD2Dを用いて金型図面の製図も
-
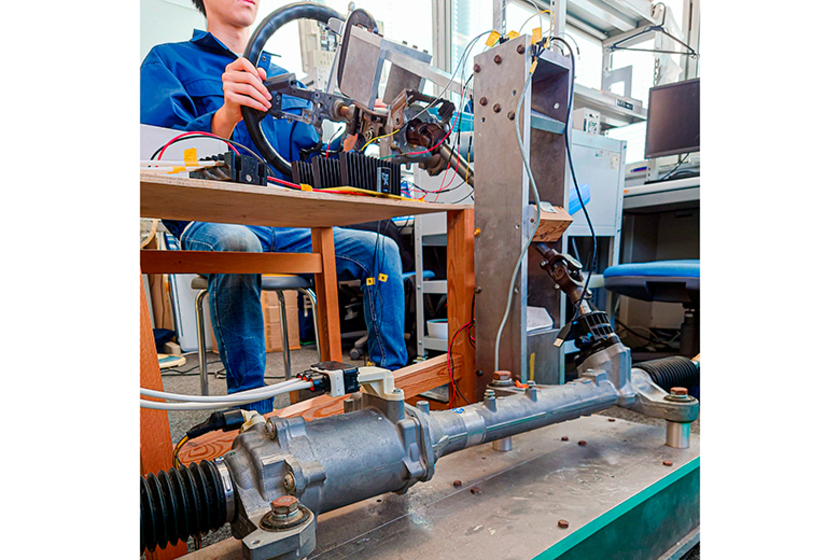
自動運転化にも役立つ効果予測研究を実施
学校で学んでいること・学生生活
先端自動車工学研究室に所属し、卒業研究として「トラック用電動パワーステアリングのヨーレイトフィードバック制御の効果予測」を行っています。トラックが横風にあおられてハンドルを取られた時の自動アシスト制御の研究で、安全性向上やドライバーの疲労軽減につなげていきます。
これから叶えたい夢・目標
高校生の時にカーレースのスーパーGTに夢中になりました。特にホンダNSXが好きで、内定をいただいた本田技研工業で働くことを夢見ていました。いつか自分が製作した車に乗り、また、それが街中を走っている光景も見てみたいです。そして、レーシングカー製造にも携われる技術者になりたいと思います。(2023年10月時点)
この分野・学校を選んだ理由
オープンキャンパスに参加し、先端自動車工学研究室の清水康夫教授が電動パワーステアリングを発明したと知り、教授の下で研究したいと考えたからです。また、幅広い分野を学びたいという思いもありました。
分野選びの視点・アドバイス
1年次の「ワークショップ」で、工具の正しい使い方や分解・組立時の注意点を学びます。ライントレースロボットをつくる実習では、失敗を恐れず、諦めずに挑戦する大切さを学ぶことができました。
※この画面の情報は、すべて取材した時点でのものになります。
この先輩が通っているのは...

この学校のおすすめ記事
-
 在校生新たな価値を創造できるエンジニアを目指したい理工学部 情報システムデザイン学系
在校生新たな価値を創造できるエンジニアを目指したい理工学部 情報システムデザイン学系 -
 在校生段階的な学びを通してプログラミング技術が大きく向上しました!工学部 情報通信工学科
在校生段階的な学びを通してプログラミング技術が大きく向上しました!工学部 情報通信工学科 -
 在校生幅広い分野の知識を得てから興味に応じて専門性を深められます工学部 情報通信工学科
在校生幅広い分野の知識を得てから興味に応じて専門性を深められます工学部 情報通信工学科 -
 在校生幼い頃から好きだった大型機械をつくる仕事に就ける喜び工学部 機械工学科
在校生幼い頃から好きだった大型機械をつくる仕事に就ける喜び工学部 機械工学科
先端機械工学科で目指せる仕事